方位と速度の判定について
本システムでは方位と速度を判定するために、GPSから取得可能な位置情報(緯度・経度)をもとにこれらを算出する方法を採用しています。本来は方位はコンパス(ジャイロセンサー)を、速度は速度計(加速度センサー)を用いて算出するのがより正確な値を取得する方法ですが、端末機種によってはこれらを装備していなかったり、値が不正確(不安定)であるとの問題があるため、以下に示す方法を採用しました。その上でいくつかの注意点があります。
速度と方位について知って欲しい事
速度と方位は連続する2点間の測位結果から、2点間の距離および2点間の測位時刻の差 を用いて概算値を取得しています。2点間の測位時刻は端末のスペックにもよりますが、概ね1秒間隔で連続して処理されます。測位結果が安定している場合は、測定された結果は相当の精度で信用することができます。しかし以下のような条件だと全く計測できないか、あるいは非常に不正確な値となる事があります。
トンネル内部、地下駐車場等
衛星が捕捉できずに新たな測位点に関する情報が入手できないため、自車アイコンの位置も全く変化しません。よって計測された値は前回取得した結果から一切変化しません。
高架橋の下や高層ビルの谷間など
測位精度が悪化するために信頼できない値を受信してしまうことがあります。自車アイコンの位置は刻々変化しますが、実感と異なる場所を転々とするような場合には(実感とは異なる)各種計測値が得られる場合があります。
アプリが画面裏に隠れている時
ブラウザ画面を起動したまま、別のアプリを起動するなどしてシステムの画面が背面になっている(バックグラウンドになっている)場合には情報を測位することができません。そのままの状態で実際に移動をすると、システムの画面を背面にする直前に測位した場所とシステム画面を前面に表示した場所(測位を再開した場所)が一直線に結ばれた軌跡が表示され、それに基づいた方位の計算が行われます。
現在の方位と速度を確認する
これらはマップ画面において常時地図画面の上部に表示されます。現在地の追跡中(自車アイコンの動きに合わせて地図の中心が自動的に遷移する状態の時)は継続して測定値が画面上で更新されます。
表示色はGPSの測位精度を示します。
- 緑色の場合
- GPSの測位精度が10m未満であり、受信状態が良好であることを示します。
- 黄色の場合
- GPSの測位精度が20m未満であり、受信状態がやや悪い状態であることを示します。
- 赤色の場合
- GPSの測位精度が20m以上であり、受信状態が悪化していることを示します。
走行軌跡について
2025-09-18版 よりGPSから受信した位置情報をマップ上にプロットする機能を設けました。以下のように走行軌跡としてマップ上に描画します。

- 赤い丸印
- 方位を判定した場所を示します。
- 赤い直線
- 方位を判定した2点間を直線で結んだモノです。
- 同心円
- 方位を判定するための基準となる距離範囲(走行中判定基準)を示します。自車の位置がこの範囲円の外に出たことを検知した場合に方位を判定し、この同心円を新たに再配置します。
GPS測位のカスタマイズについて
の各値を変更してください。
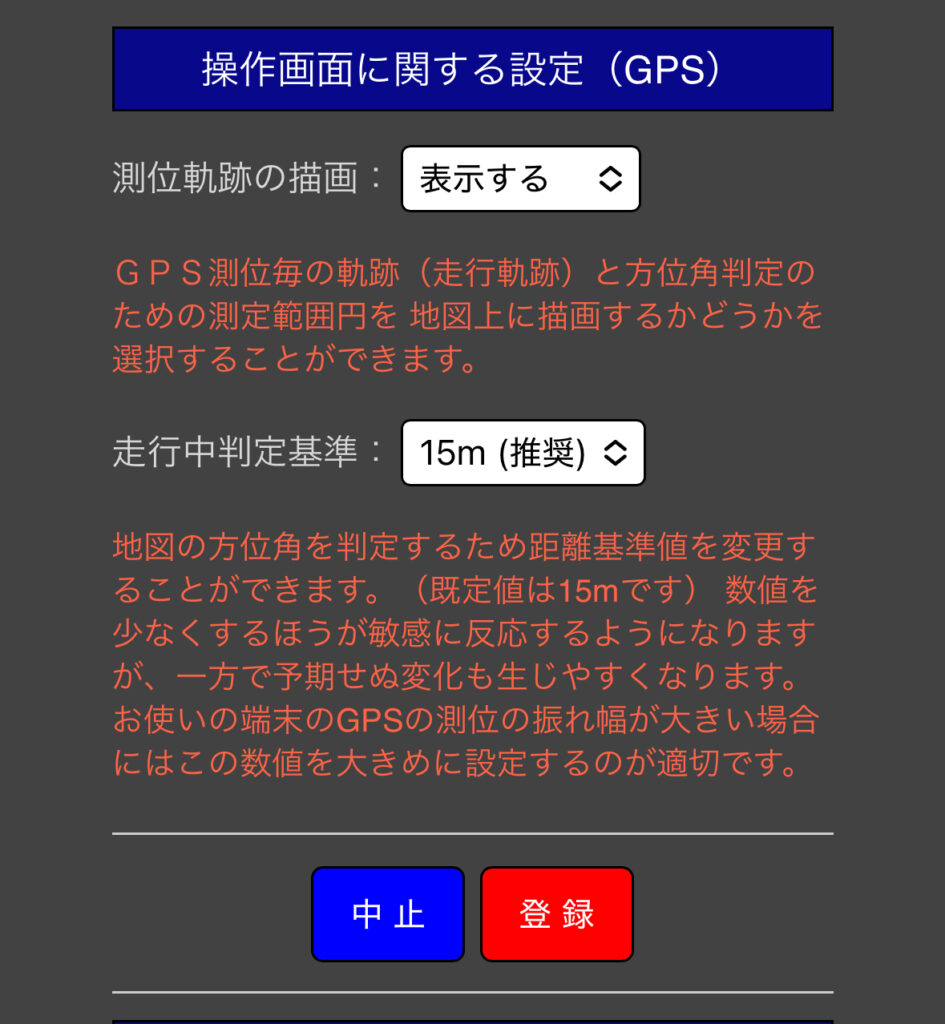
走行軌跡(測位軌跡)の描画を止めたい場合
を「表示しない」に変更する。
方位が頻繁に意図しない方向を指し示す場合
を長めの距離に変更する。
参考文献、算出方法など
位置情報から速度を得る方法
これについては自明である。
速度(m/秒)=時間的に隣接する2点間測位点の距離(m)/ 双方の測位時間の差(ミリ秒)* 1000
参考文献等
2点間の緯度、経度から距離を求める方法については以下のサイト等が参考になった。
位置情報から方位と走行状態を得る手順
各測位点には実際の場所との誤差が含まれており、「実際の停車中」においても本来の現在位置の周辺に不規則な測位結果を残すことがある。これにより予期せぬタイミングで体感とは異なる方位が出力されてしまう。したがって論理的に「走行中である」と判定できない場合には新たな方位角を算出しないようにする。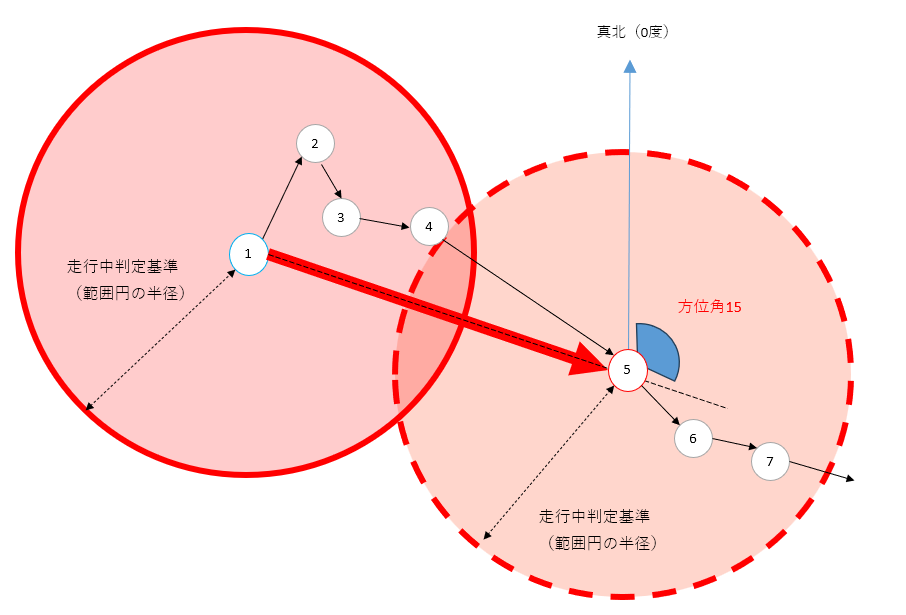
そこで、新しい測位点が方位算出場所①から定められた距離(走行中判定基準)を離れた場合に初めて「走行中」であると見做し、その測位点⑤と方位算出場所①の緯度、経度から方位角15(真北からの進行方向)を算出することにした。加えて新しく方位角を算出してから以降の測位3回以内(⑤~⑦)に測位点⑤を中心とする同心円内を離脱できない場合には改めて「停車中」であると見做すこととする。
参考文献等
2点間の緯度経度から方位角を算出する方法については以下のサイト等が参考になった。